メモ代わりに気まぐれに投稿
-

# PowerShellとC#の違い?
-
PowerShellはオブジェクト指向?
-
MarkItDown MCP Server
-
Think Tool MCP Serverの導入
-
AI think ツール
-
Brave Search MCP Serverの導入
-
Filesystem MCP Serverの導入
-
【環境構築】Claude Desktop + MCPサーバー on Windows11
-
ヤコブ・ニールセンのユーザビリティ10箇条(10原則)をAI要約
-
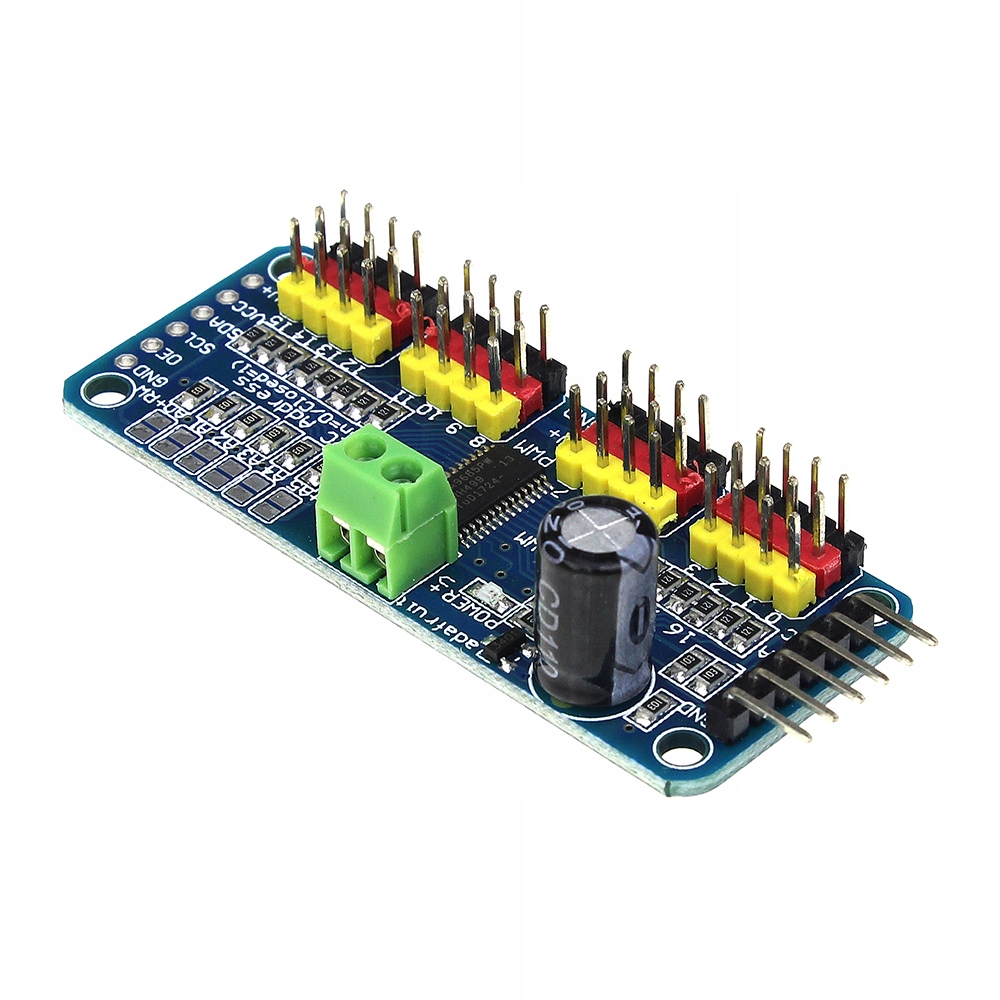
【ROS2】サーボモーター(SG90)を回したい