
2024年– date –
-

【ROS2】サーボモーター(SG90)を回したい
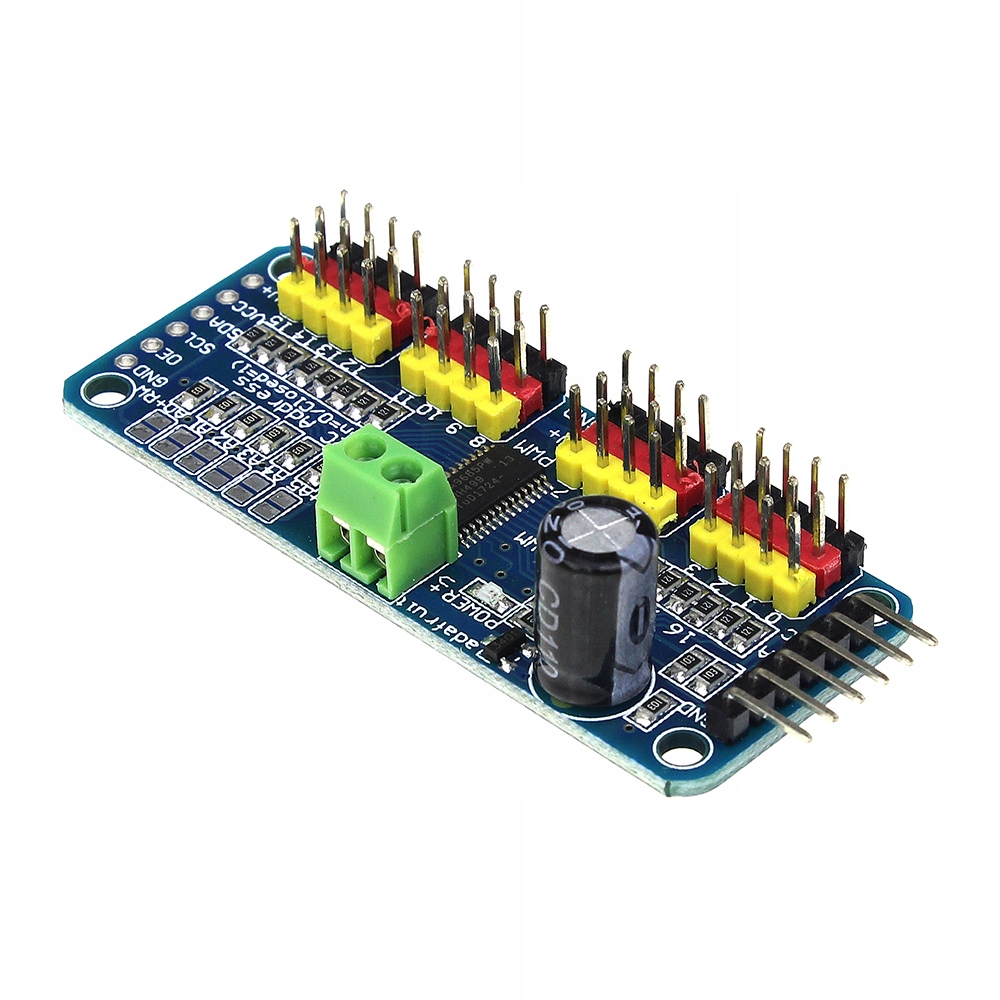
概要 Raspberry Pi4、Ubuntu22.04LTS、PCA9685、Python、ROS2 Humbleで、サーボモーター(SG90)を0~180度回したい。 ※ChatGPTで、「優秀なロボティクス講師」としてロールプレイして頂いた記録。 SG90とは 一般的に広く使用されている小型サーボモーター... -
【ROS2】サーボモーターを回したい
概要 Raspberry Pi4、Ubuntu22.04LTS、PCA9685、Python、ROS2 Humbleでサーボモーターを廻したい。 ※ChatGPTで、「優秀なロボティクス講師」としてロールプレイして頂いた記録。 PCA9685とは 16チャンネルのPWM(パルス幅変調)信号を生成できるI2Cベース... -
【ROS2】Publisher
パブリッシャー(Publisher)とは ROS 2の通信モデルの中で、特定の「トピック」に対してメッセージを送信する役割を持つノードのこと。 パブリッシャーの役割 ROS 2のノード同士の通信は、トピック(Topic)という名前付きのデータストリームを通じて行わ... -
【ROS2】Subscriver
Subscriverのコード ROS 2で、パブリッシャーからのメッセージを購読するサブスクライバーを作成するPythonプログラムの覚え書き。 import rclpy from rclpy.node import Node from std_msgs.msg import String class TrialSubscriber(Node): def __init__... -
【ROS2】amentについて
amentの概要 amentはcatkinの進化形。※catkinはROS1時代のビルドシステム。 複数のパッケージに分かれたアプリケーションのビルドを効率化するためのシステム。 パッケージを設定、ビルド、インストールするためのシステム (例:CMakeやPython setuptools... -
【C#】コマンドラインでプロジェクトを作成
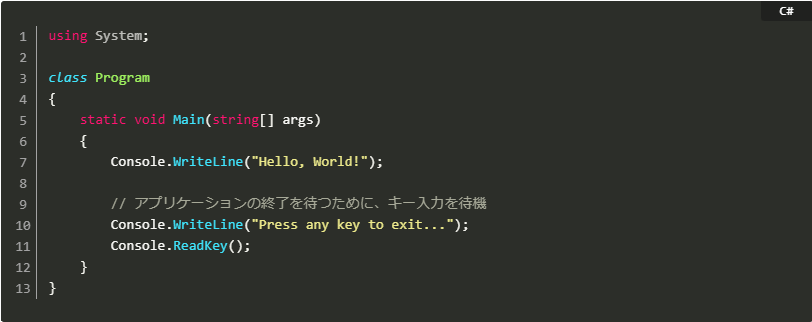
説明 C#のコンソールアプリケーションをPowerShellを使用してコマンドラインで作成し、exeファイルをダブルクリックで実行したい。 前提条件 .NET SDKがインストールされている必要がある。インストールされているか下記で確認できる。 dotnet --version #... -
【PowerShell】EXCELからデータ取得
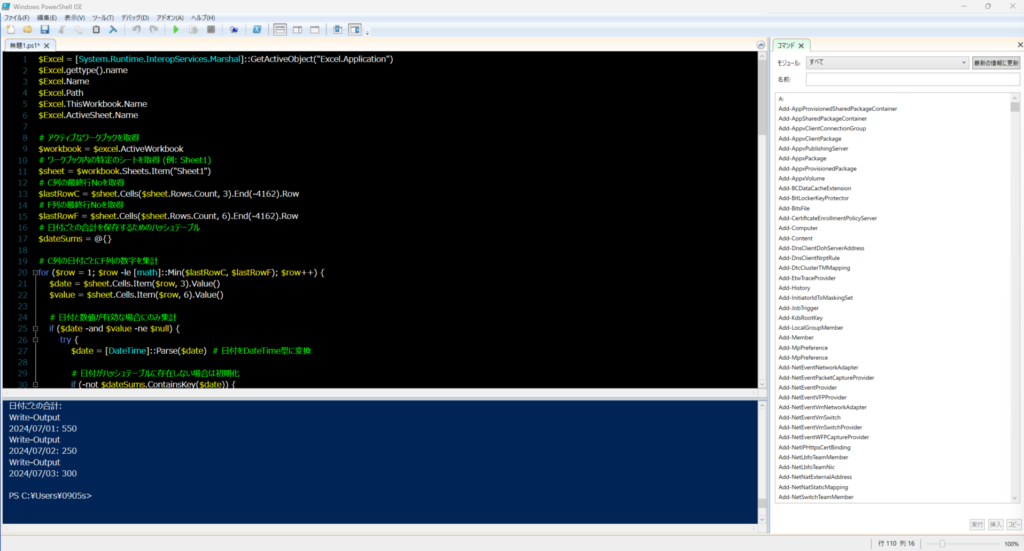
説明 開いているアクティブなエクセルのワークブックのアクティブなシートからデータを取得したい。 仕様 EXCELワークブックは開いていて、アクティブな状態。 データはアクティブなシートから取得。 日付はC列から取得。 数値はF列から取得。 出力先はPow... -
【PowerShell】指定フォルダ内の読み取り専用を取得する
指定フォルダ(現在のフォルダ)内のフォルダ、ファイルから、読み取り専用を判定し取得したい。 説明 まずは、Get-ChildItemコマンドレットでフォルダ内の情報を取得してみる。 Get-ChildItem -Path . -Recurce パスを指定。 相対パス:現在のフォルダー ... -
【PowerShell】変数とデータ型
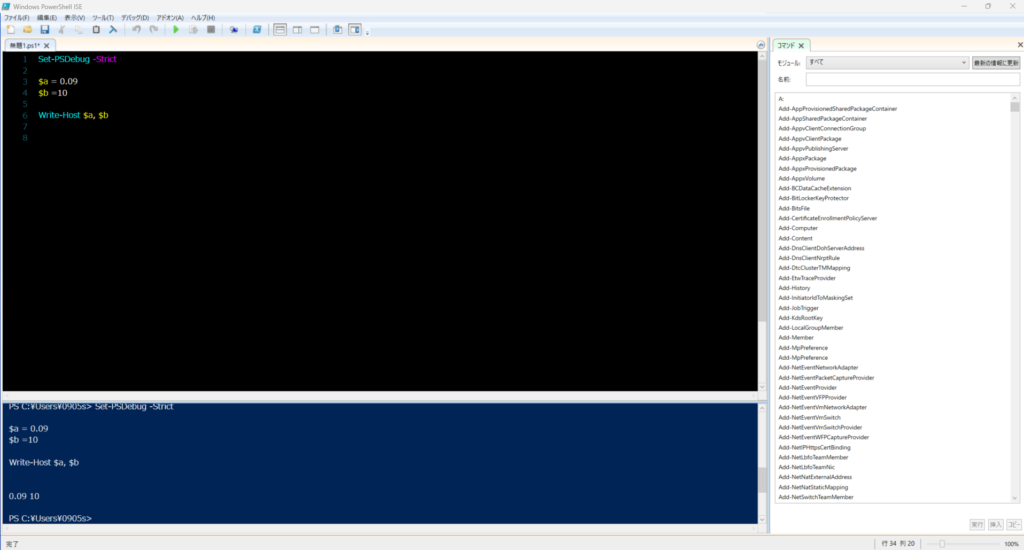
変数とデータ型の覚え書き -
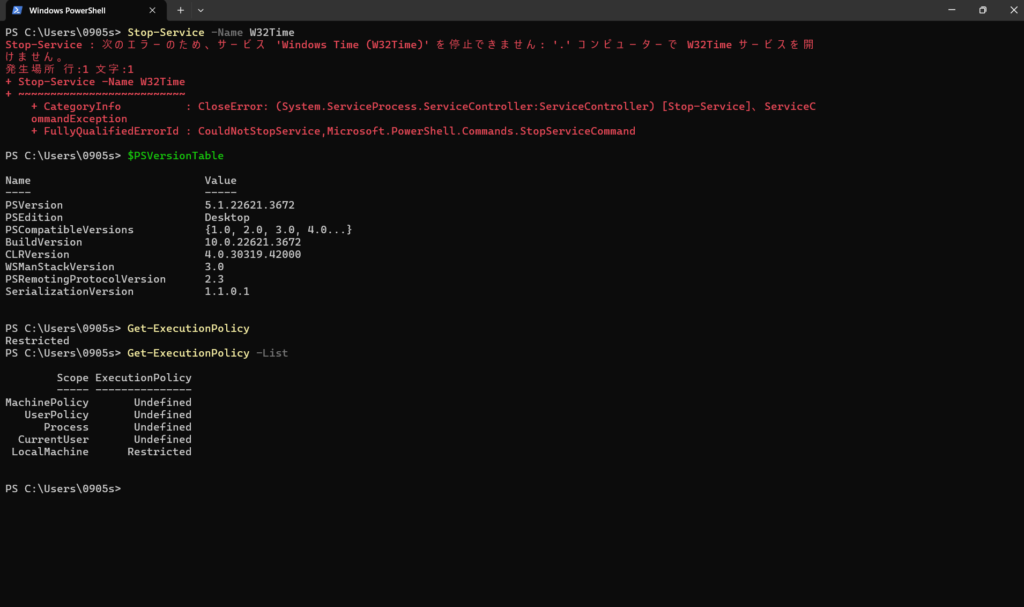
【PowerShell】実行ポリシーについて
説明 PowerShellの実行ポリシー:構成ファイルの読み込み、スクリプト実行を制御する安全機能。 悪意のあるスクリプトの実行を防止する。 Windowsでは、 ローカルコンピューター 現在のユーザー 特定のセッション に対して実行ポ...

12