
ROS2– category –
-

【ROS2】サーボモーター(SG90)を回したい
概要 Raspberry Pi4、Ubuntu22.04LTS、PCA9685、Python、ROS2 Humbleで、サーボモーター(SG90)を0~180度回したい。 ※ChatGPTで、「優秀なロボティクス講師」としてロールプレイして頂いた記録。 SG90とは 一般的に広く使用されている小型サーボモーター... -
【ROS2】サーボモーターを回したい
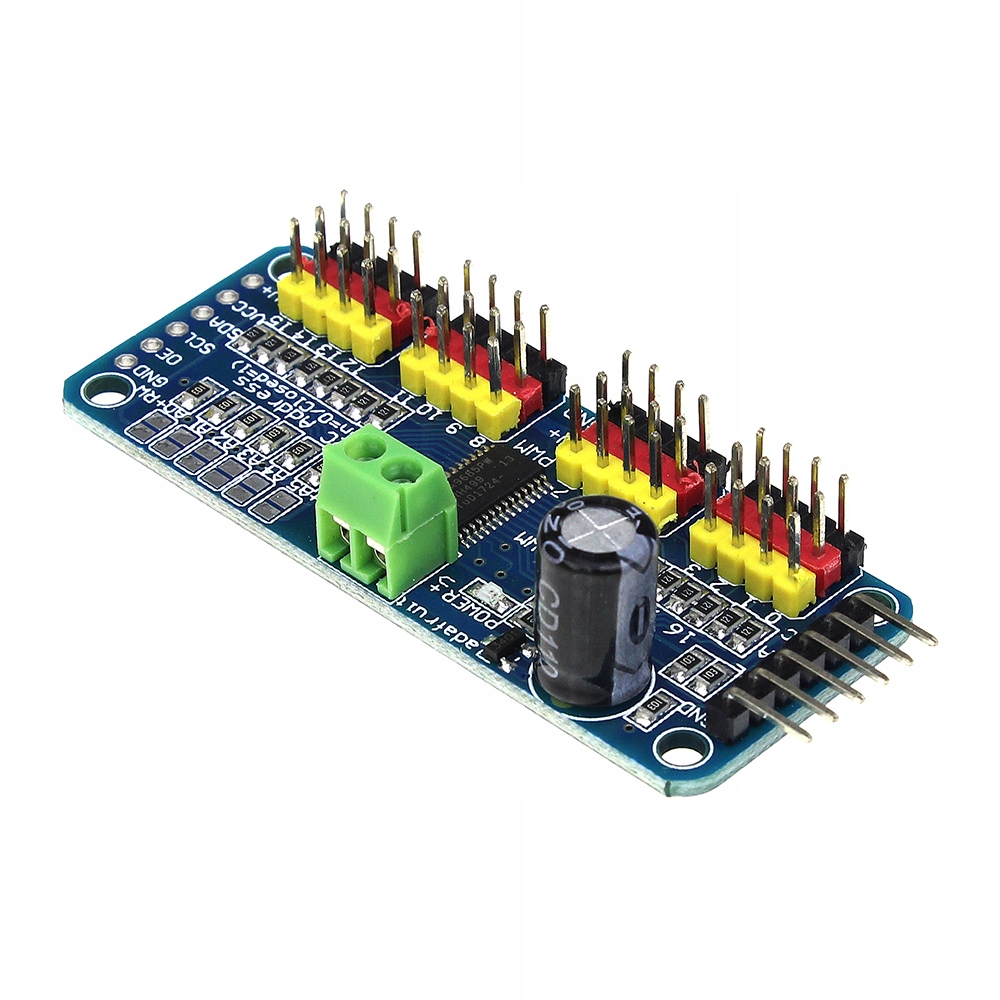
概要 Raspberry Pi4、Ubuntu22.04LTS、PCA9685、Python、ROS2 Humbleでサーボモーターを廻したい。 ※ChatGPTで、「優秀なロボティクス講師」としてロールプレイして頂いた記録。 PCA9685とは 16チャンネルのPWM(パルス幅変調)信号を生成できるI2Cベース... -
【ROS2】Publisher
パブリッシャー(Publisher)とは ROS 2の通信モデルの中で、特定の「トピック」に対してメッセージを送信する役割を持つノードのこと。 パブリッシャーの役割 ROS 2のノード同士の通信は、トピック(Topic)という名前付きのデータストリームを通じて行わ... -
【ROS2】Subscriver
Subscriverのコード ROS 2で、パブリッシャーからのメッセージを購読するサブスクライバーを作成するPythonプログラムの覚え書き。 import rclpy from rclpy.node import Node from std_msgs.msg import String class TrialSubscriber(Node): def __init__... -
【ROS2】amentについて
amentの概要 amentはcatkinの進化形。※catkinはROS1時代のビルドシステム。 複数のパッケージに分かれたアプリケーションのビルドを効率化するためのシステム。 パッケージを設定、ビルド、インストールするためのシステム (例:CMakeやPython setuptools...

1